The purpose of this project was to create a robot to do a task. It could be helpful, or not at all. In my case, I decided to make a somewhat useful robot for my dog, Kala.
Right away I knew I wanted to do something for my dog, Kala (shown in the image below). She is a picky eater, and with only a couple of treats in her belly she gets full. That's why a treat feeder was the idea that seemed the most fun to do.

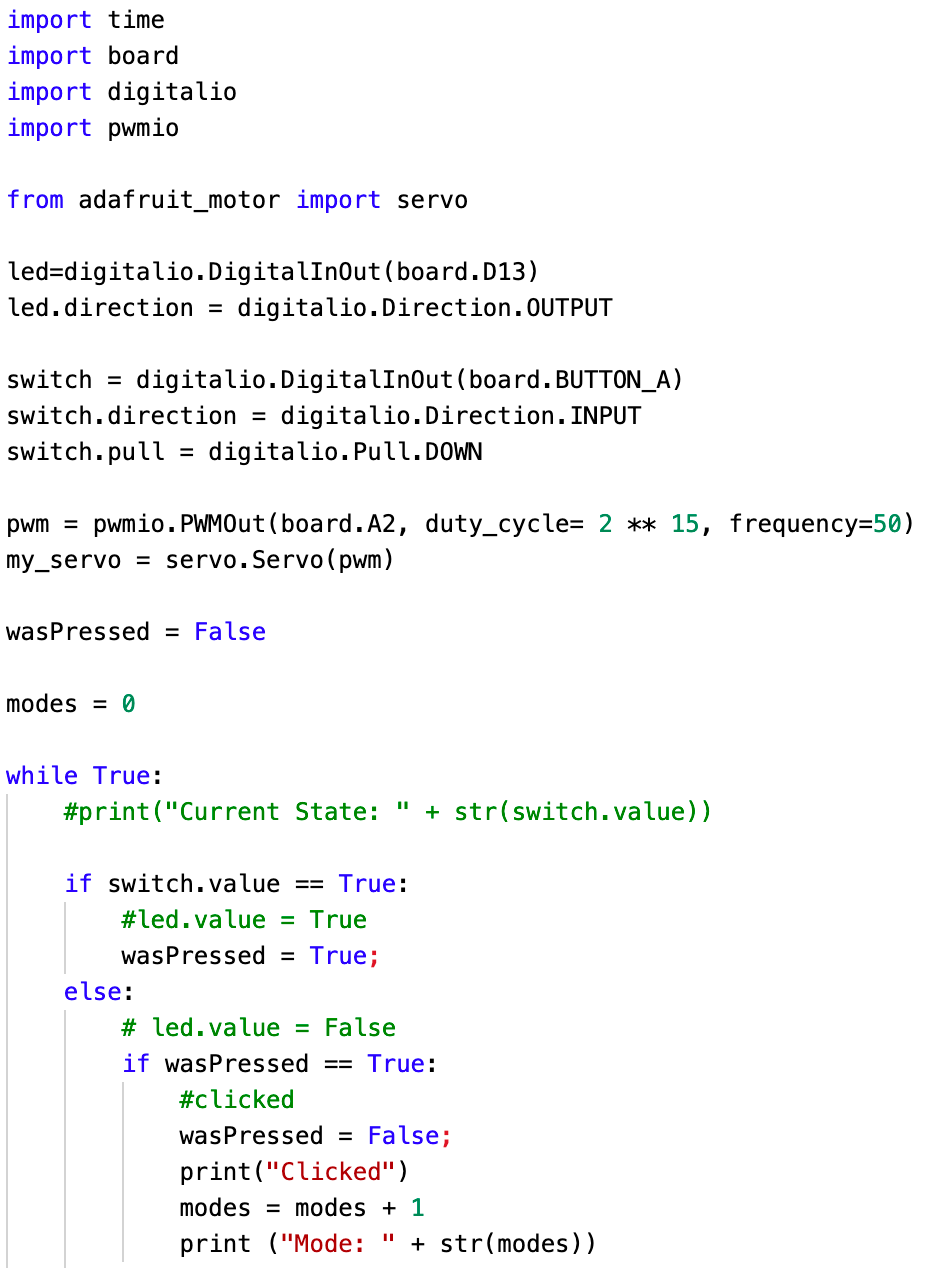
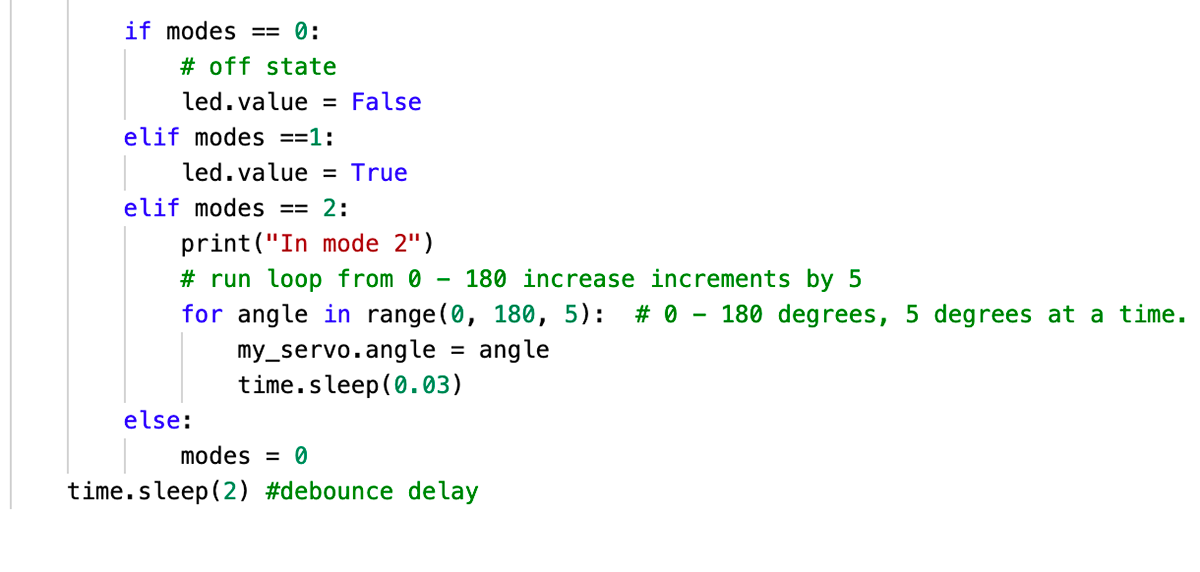
The code used for this task are shown below. This codes allowed me to get all the treats available in the small cup, and it allowed for me to turn it on and off.
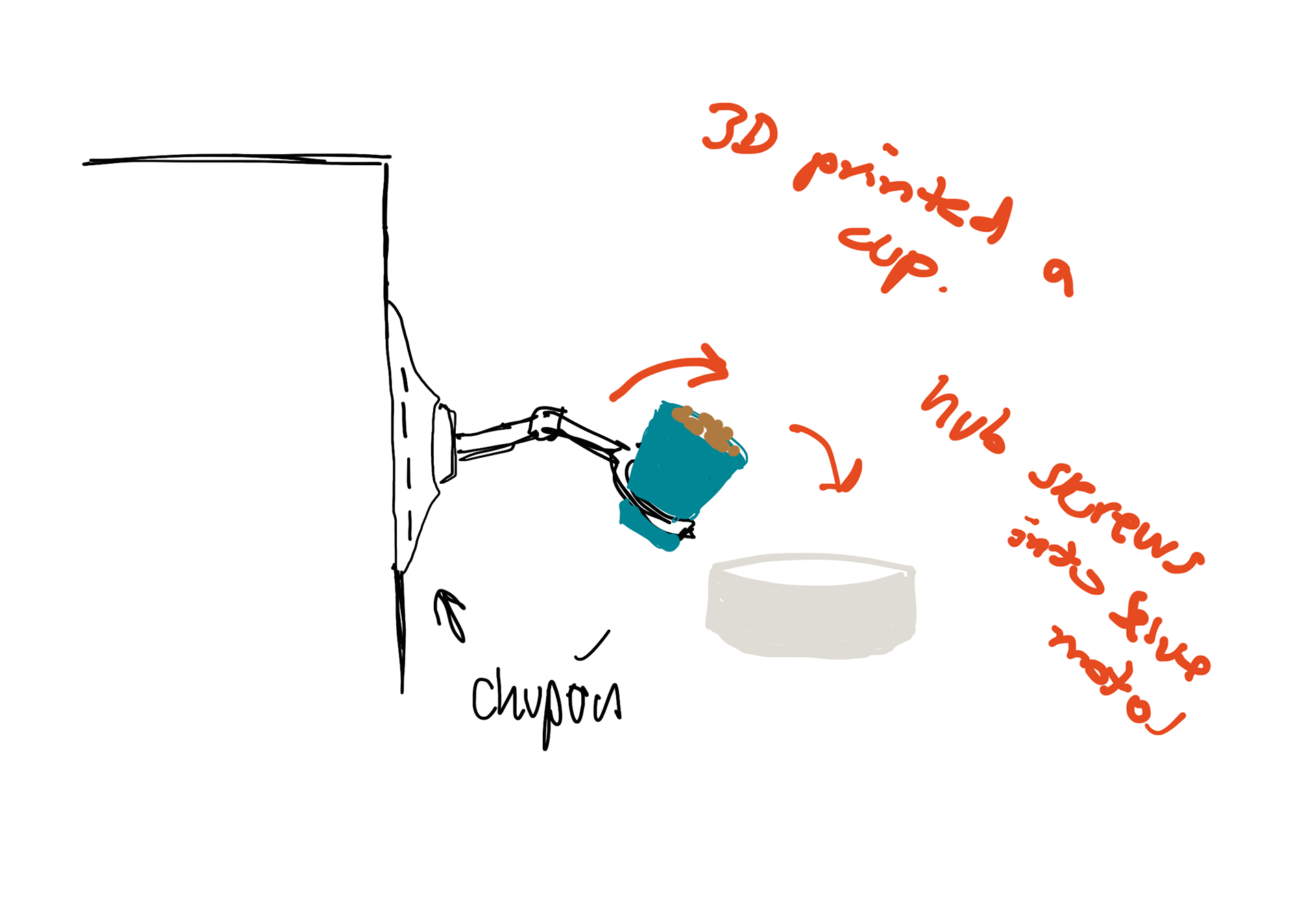
1. Sketching, my idea came right away, and the basic was already stablished in the first sketch.
2. Secondly, using Visual Studio Code to edit the code I added the mode feature with "while True" and "if", "else" statements, in order to be able to turn on and off the servo. As for the servo, I coded it so it would turn 180 degrees, and also the time was slowed down, so the treats don't come out flying.
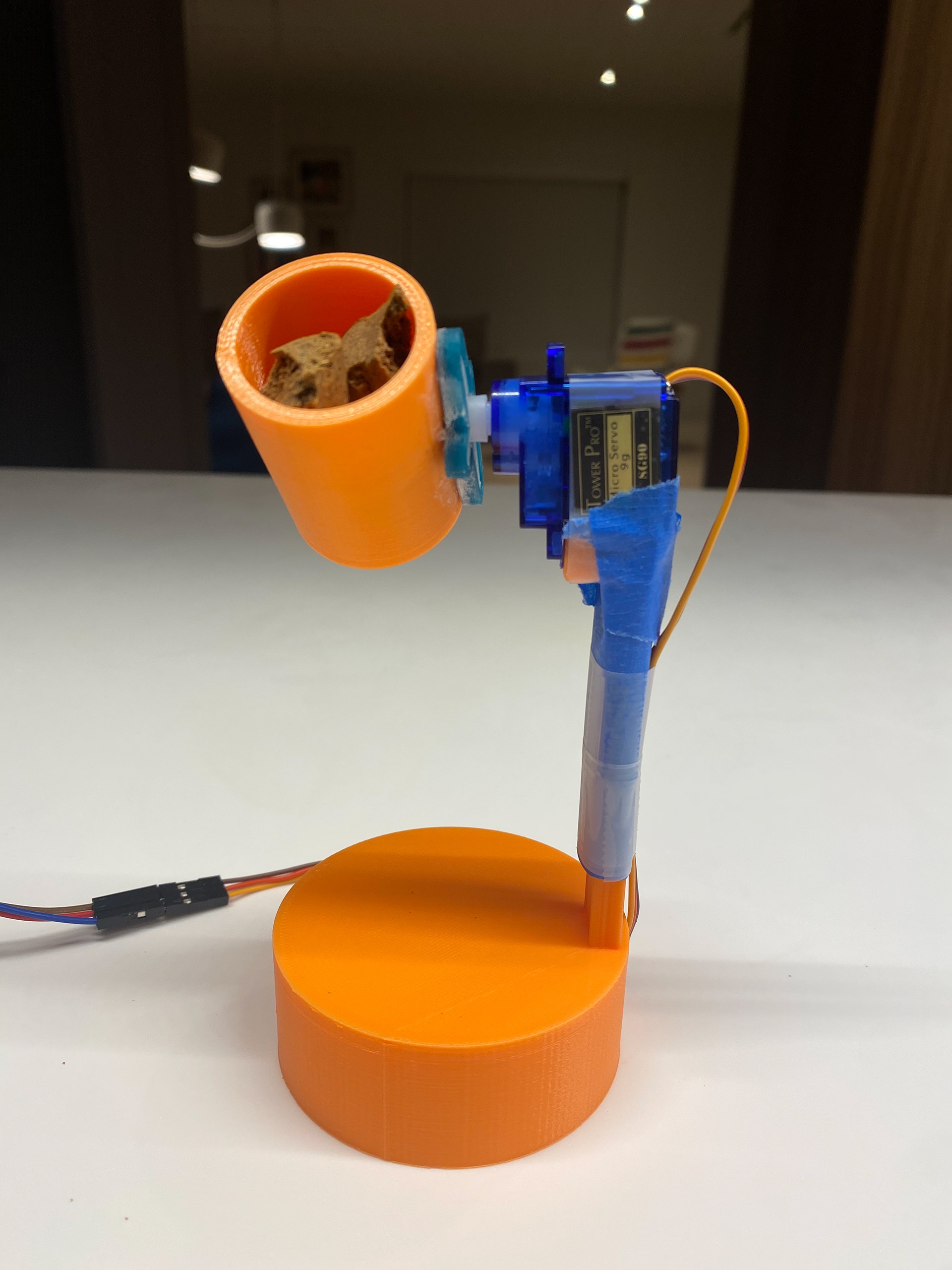
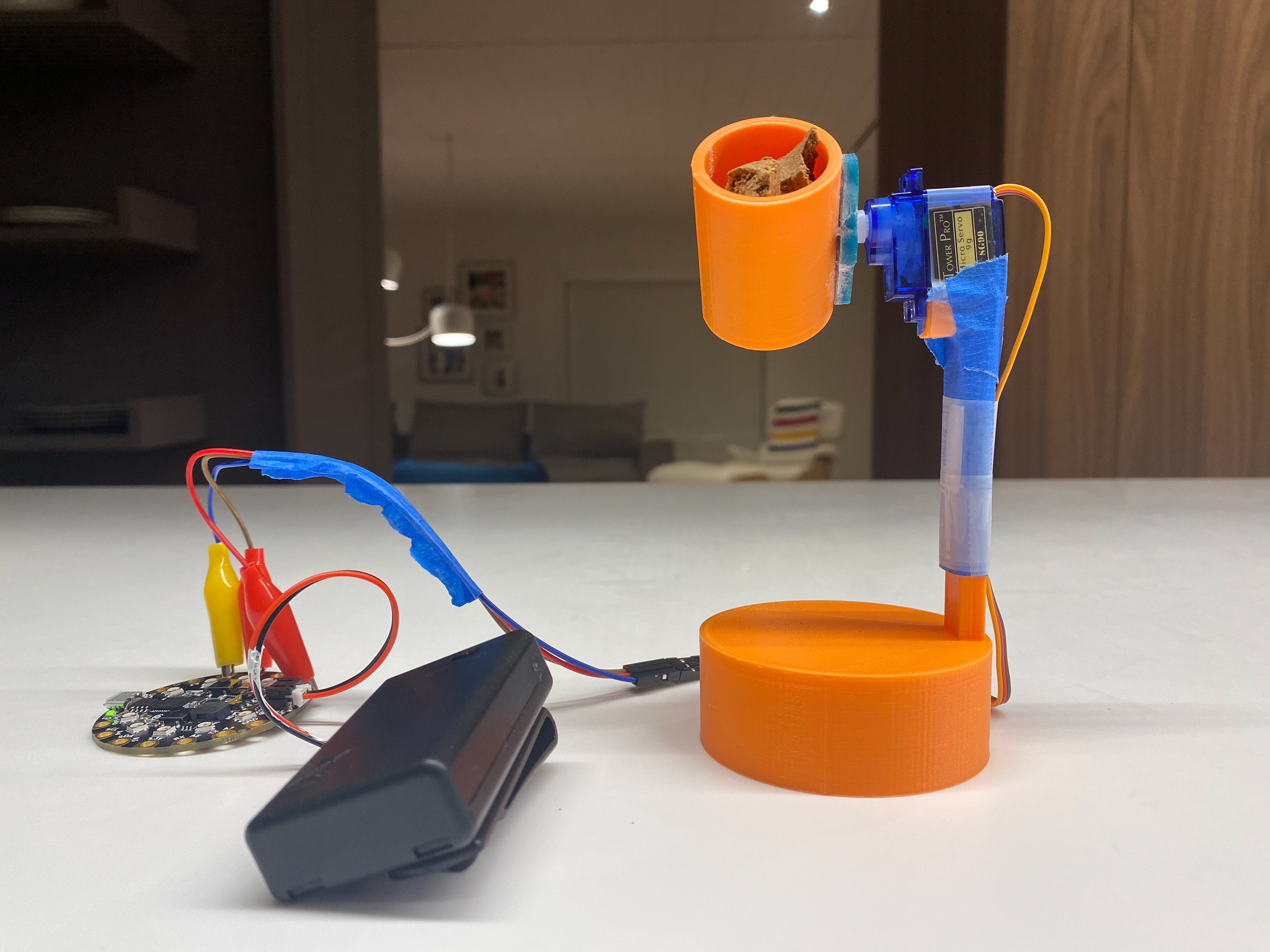
3. After figuring out the code, I started the designing part of the physical shapes. For this part, I used the online program, OnShape, after exporting the parts I uploaded them to the Ultimaker Cura print software where I was able to set up my 3D print of the physical parts, which took around 3 hours and 20 minutes.

The next step on this project could be to add copper wire sensors in order to activate the motor and turn the cup whenever my dog puts her paw on the designated place.